

Robotics in Underwater Exploration and Maintenance:
Innovation Beneath the Surface
The Earth's oceans cover over 70% of the planet's surface, yet less than 20% of the seafloor has been mapped with high resolution. This paradox of scale versus knowledge has driven the development of underwater robotics—sophisticated machines engineered to operate in environments of crushing pressure, zero visibility, corrosive saltwater, and limited communication. From inspecting submerged oil pipelines to exploring sunken archaeological sites and deep-sea ecosystems, robotic technologies are becoming essential for discovery and maintenance beneath the waves.
This article delves deep into the rapidly advancing world of underwater robotics. It examines the evolution of technologies, current industrial and scientific applications, major engineering challenges, and innovative solutions. Beyond today’s capabilities, it also projects a visionary future for robotic systems that will operate autonomously, learn adaptively, and possibly even collaborate biologically with marine organisms. In doing so, we offer insights and strategic foresight for engineers, oceanographers, and decision-makers invested in the blue frontier.
Image: Pexels Francesco Ungaro
Early Beginnings and Mechanical Limits
The earliest remotely operated vehicles (ROVs) emerged in the 1950s and 60s for military purposes, often used for recovery missions. These machines were little more than tethered boxes with cameras, severely constrained by rudimentary controls and limited visual feedback. The development of the first modern ROVs, such as Jason Jr. (used in the Titanic exploration in 1986), marked a leap in teleoperation and sensor integration.
The Rise of Autonomous Underwater Vehicles (AUVs)
By the 1990s, advances in computing and power systems enabled the birth of autonomous underwater vehicles (AUVs)—untethered platforms capable of independent navigation. These robotic systems, unlike ROVs, could follow preprogrammed missions for seafloor mapping, hydrothermal vent monitoring, and oceanographic data collection.
Today’s AUVs, such as the REMUS 6000 and HUGIN, feature advanced inertial navigation systems (INS), Doppler velocity logs (DVL), and sophisticated onboard AI capable of environmental decision-making. The transition from manual control to autonomy has significantly broadened the role of underwater robotics in modern exploration.
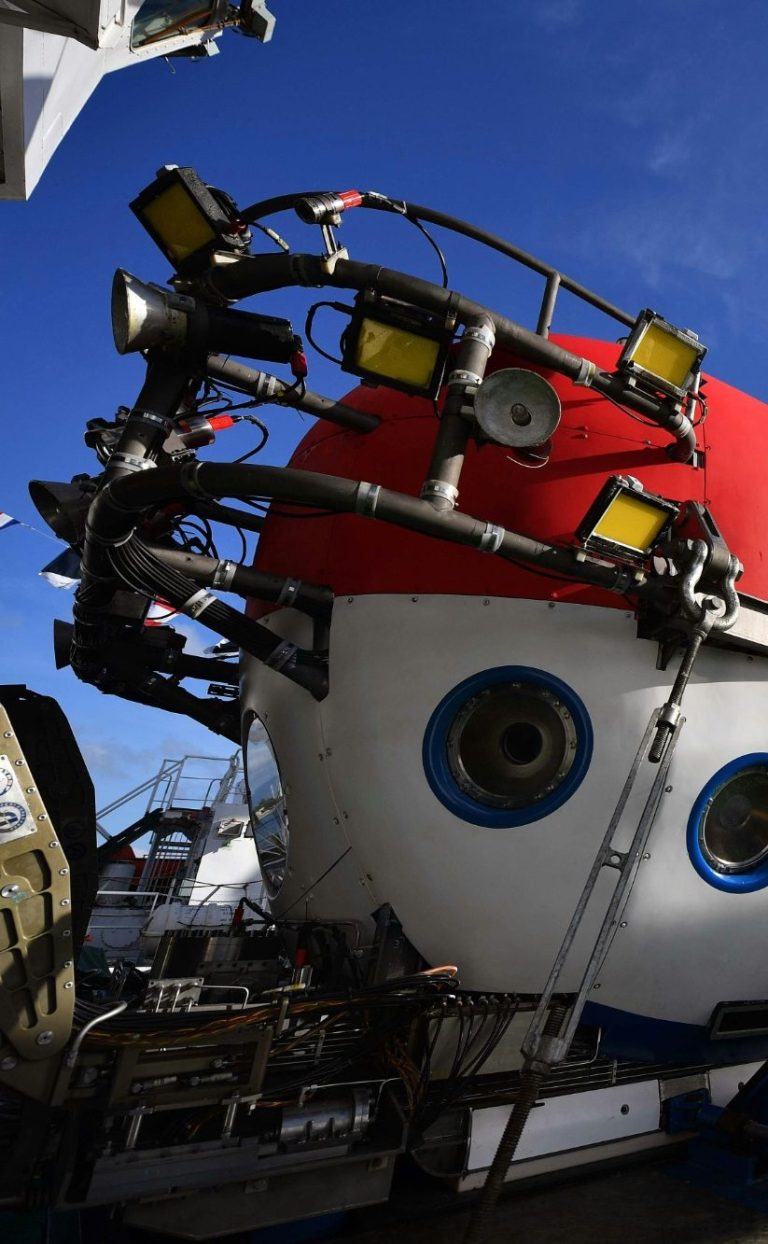
Image: Pexels Greece-China New
The Evolution of Underwater Robotics
Current Applications of Underwater Robotics
Deep-Sea Exploration and Mapping
Autonomous and remotely operated vehicles are now indispensable for mapping underwater terrains, especially in areas inaccessible to humans. These include tectonic boundaries, abyssal plains, and hydrothermal vents. Advanced sonar and photogrammetry systems enable sub-centimeter resolution mapping, critical for geoscientific analysis and resource exploration.
Offshore Energy Infrastructure
Underwater robots are extensively used in oil and gas maintenance, particularly for pipeline inspections, leak detection, and corrosion monitoring. The cost of halting operations due to faults or manual checks is astronomical; robotic inspections reduce risks, cut costs, and improve safety margins.
Renewable Ocean Energy
As offshore wind farms and wave-energy converters become more prevalent, robots are used to inspect turbine foundations, subsea cables, and mooring systems. Predictive maintenance powered by robotic data collection ensures minimal downtime and extends equipment lifespan.
Environmental Monitoring and Marine Biology
Robots collect real-time environmental data in critical habitats, such as coral reefs or polar ecosystems. Robotic swarms are being tested for monitoring pollution, microplastics, and marine life migration. Some platforms, like Gliders, can operate for months, covering thousands of kilometers.
Search and Rescue / Forensics
Underwater robotics has also transformed maritime forensic science, enabling recovery missions for sunken aircraft, shipwrecks, and evidence collection in submerged environments. The robotic approach ensures data integrity while minimizing human risk.

AI-Powered Navigation and Decision-Making
Traditional underwater navigation relies on GPS-deprived environments. Today, AI algorithms integrate sensor fusion—INS, DVL, acoustic beacons, and visual odometry—for real-time mapping and navigation. Reinforcement learning is now used to teach robots how to respond to novel terrain or obstacles.
Soft Robotics and Biomimetic Designs
Nature offers elegant solutions to complex engineering challenges. Bioinspired soft robots, mimicking the octopus, squid, or eel, are under development for agile, silent, and damage-resistant operations. These robots use hydrogel muscles, elastomeric skins, and artificial tentacles to interact with delicate environments like coral reefs without damage.
Energy Harvesting and Ultra-Efficient Power Systems
Power is a major constraint. Innovations in ocean thermal energy conversion (OTEC), piezoelectric wave harvesting, and buoyancy-driven gliding allow underwater robots to recharge or extend missions using ambient energy sources. Some AUVs now use fuel cells that can last weeks.
Swarm Robotics and Cooperative Autonomy
Inspired by fish schools, swarm robotics leverages distributed intelligence where multiple smaller units collaborate to map large areas, track moving targets, or adapt to dynamic conditions. Swarm algorithms are being refined to ensure robustness even if one or more robots fail.
Underwater Wireless Communication
The underwater environment impedes high-bandwidth communication. Emerging solutions include acoustic modems, optical laser comms, and magnetic induction systems. Future designs aim to achieve near-real-time underwater cloud computing, enabling better coordination and AI responsiveness.
Technological Innovations Enabling Underwater Robotics
Image: AdobeStock
Navigation Without GPS
Combining SLAM (Simultaneous Localization and Mapping) with acoustic beacon triangulation and visual recognition offers viable alternatives to GPS underwater. Research in quantum navigation is also gaining traction.
Battery life remains a limiting factor. Advances in solid-state lithium batteries, AI-managed energy optimization, and in-situ energy harvesting are enabling longer missions without compromising payloads.
Power Limitations
Long-duration deployments must resist saltwater corrosion and biological growth. Nanocoatings and anti-fouling polymers, some derived from shark skin or lotus leaf structures, help reduce maintenance needs.
Corrosion and Biofouling
Pressure and Structural Integrity
Deep-sea pressures can exceed 1000 atmospheres. Engineers are developing pressure-tolerant electronics, carbon composite pressure vessels, and ceramic shielding to protect onboard systems. Structural optimization using topology algorithms helps balance strength and weight.
Engineering Challenges and Innovative Solutions
Cross-Sector Integration
Underwater robots will soon support not only marine industries but also national security, undersea cable protection, space analog missions, and climate change mitigation, especially in monitoring carbon sinks or methane leaks.
Underwater cities or research labs could rely on robotic systems for life support, maintenance, resource extraction, and even construction. Robotic masons, 3D-printing drones, and AI maintenance teams are part of this vision.
Permanent Ocean Habitats and Robotic Caretakers
Projects are underway to integrate biological tissue with mechanical frameworks, such as muscle-actuated robots or genetically engineered microorganisms that generate energy for the host machine. This could redefine what we consider a robot.
Biohybrid Systems
Self-Healing Robots
Emerging materials like conductive hydrogels and self-repairing elastomers are paving the way for robots that can seal leaks or restore functionality autonomously. This is especially valuable for deep-sea missions where recovery is impossible.
The Future of Underwater Robotics: Vision 2035
Toward the Robotic Renaissance Beneath the Sea
Underwater robotics is not just a tool—it is a transformative force redefining how humanity interacts with its most alien frontier: the ocean. By merging biomimicry, AI, materials science, and systems engineering, we are developing machines capable of not only surviving but thriving under the most challenging conditions on Earth. As we push toward a future where robots explore Europa’s oceans or maintain undersea habitats, the innovations born today will echo across disciplines and industries for decades to come.
Image by: Pexels Emmali
References
- NOAA Ocean Exploration Reports (2023)
- MIT Sea Grant Robotics Lab Publications
- IEEE Robotics and Automation Society
- WHOI (Woods Hole Oceanographic Institution) Technology Innovations
- DARPA Manta Ray Program (2024)
- Journal of Marine Science and Engineering
- European Union Horizon Robotics for Oceans Initiative
#UnderwaterRobotics #OceanExploration #MarineEngineering
#AUVTechnology #BlueTech #DeepSeaInnovation #ROVSystems #FutureOfOceans #AutonomousVehicles #BiomimicryEngineering
Jeendry Louis
CEO

Engineering Design Robotics Aerospace and Systems Corporation © Copyright. All rights reserved.
We need your consent to load the translations
We use a third-party service to translate the website content that may collect data about your activity. Please review the details in the privacy policy and accept the service to view the translations.